- Beranda
- The Lounge
Membuat Sendiri Kamera ala MotoGP
...
TS
lovestreet
Membuat Sendiri Kamera ala MotoGP
Membuat Sendiri Kamera ala MotoGP

Seperti yang kita saksikan di ajang balap MotoGP, melalui kamera yang berada di bagian belakang motornya akan terlihat si pebalap melewati tikungan-tikungan sambil merebahkan motornya ke samping kiri dan kanan. Namun jika diperhatikan ada yang menarik ketika saat motor terlihat rebah miring, pandangan kamera terlihat tetap datar/rata. Bagaimana bisa seperti itu?
Pada kamera motor tersebut terpasang sensor Gyro dan akan dihubungkan dengan motor servo sebagai penggerak kamera, agar kamera tetap mendapatkan gambar yang tegak.
Berikut ilustrasinya

Kita bisa membuat sendiri Gyro Camera tersebut dengan menggunakan bantuan modul GYRO dan modul ACCELEROMETER.
Awalnya dua modul tersebut adalah modul yang terpisah, sehingga kita harus menggunakan dua unit modul bersamaan. Kemudian dibuatlah Chip Gyro dan Chip Accelerometer dalam satu modul (ada dua chip dalam satu modul).
Hingga akhirnya versi terbaru keduanya dibuat dalam satu chip saja, sehingga memperkecil distorsi perhitungan gerakan.
Modul yang digunakan di artikel ini adalahTriple Axis Accelerometer & Gyro Breakout – MPU-6050, dimana dalam modul ini terdapat 3-axis gyroscope dan 3-axis accelerometer dalam satu chip. Bekerja dengan catu daya 3.3volt.
Selain modul MPU6050 ini, bisa juga digunakan modul sejenis seperti:
IMU Fusion Board – ADXL345 & IMU3000
IMU Digital Combo Board – 6 Degrees of Freedom ITG3200/ADXL345
Wujud MPU6050 adalah seperti ini.Ukuran sangat kecil, hanya20mm x 15mm dan tebal 1.6mm.
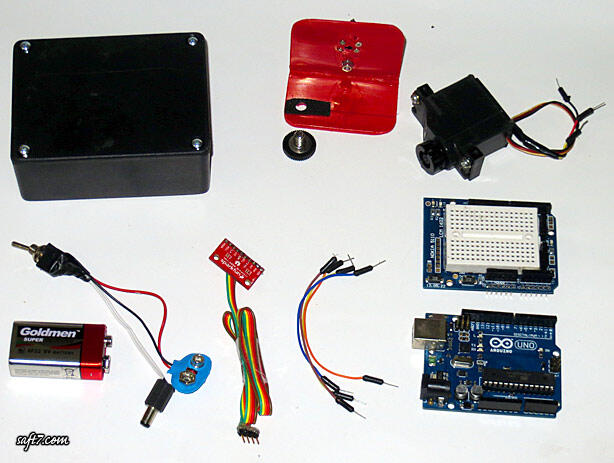
Komponen yang diperlukan antara lain:
Triple Axis Accelerometer & Gyro Breakout – MPU-6050
Arduino UNO R3 (beli)
Digital Servo (gunakan servo yang bagus dan kuat) (beli)
Breadboard Mini
Baterai 9v + Saklar
Box dan Kelengkapan lainnya.
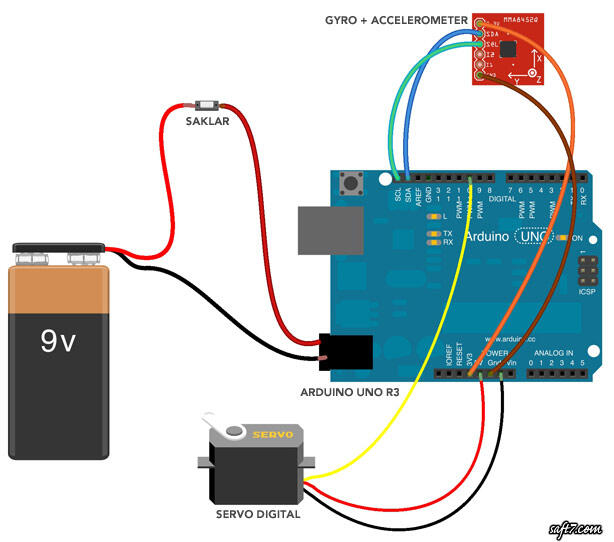
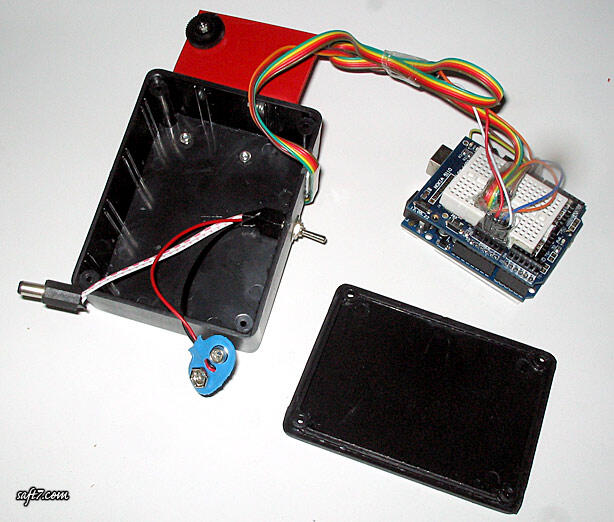
Berikut skema pemasangannya
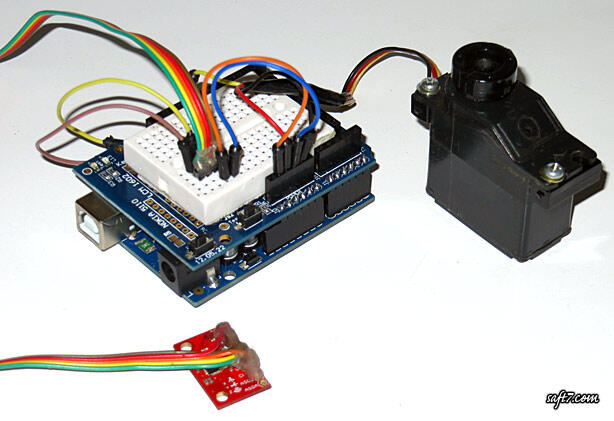
Setelah semua selesai dirangkai, saatnya untuk melakukan upload program ke Arduino.
Rangkaian proyek ini hanya untuk menggerakkan servo dalam satu axis-X saja. Namun tetap diperlukan data-data dari Axis Y dan Z untuk masing-masing Gyroscope dan Accelerometer.
Dengan perhitungan Kalman Filter, dapat meredam ‘noise’ output dari Gyroscope+Accelerometer sehingga gerakan servo menjadi halus tidak terjadi gerakan yang tidak diinginkan.
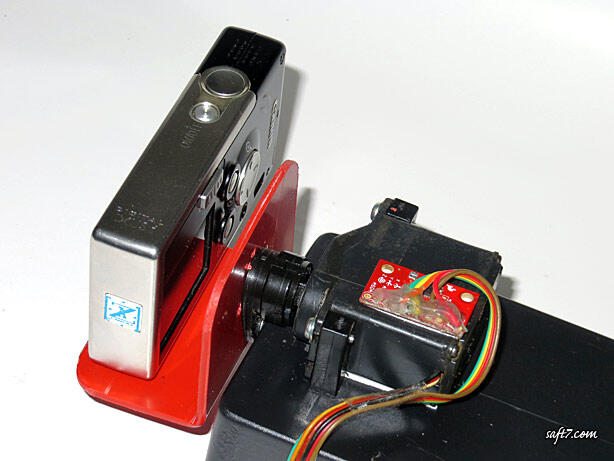
Dudukan kamera
Gunakan Acrylic setebal 2mm yang ditekuk dengan cara dipanaskan. Kemudian dibuat lubang-lubang yang diperlukan untuk pemasangan servo dan lubang baut ke kamera.


Berikut hasil video percobaannya
[YOUTUBE]

Sumber
[URL="http://oto.detik..com/read/2013/04/08/100452/2213939/1199/membuat-sendiri-kamera-ala-motogp?o991102638"]detik..com[/URL]
Makasih banyak buat yang udah bantu
apalagi yang berbaik hati ngasih ane")
Mampir gan ke Threat Ane yg lain
Ane kira Cuma ada di sms gan.. Ternyata ada juga di PM..ckckckck
Seperti yang kita saksikan di ajang balap MotoGP, melalui kamera yang berada di bagian belakang motornya akan terlihat si pebalap melewati tikungan-tikungan sambil merebahkan motornya ke samping kiri dan kanan. Namun jika diperhatikan ada yang menarik ketika saat motor terlihat rebah miring, pandangan kamera terlihat tetap datar/rata. Bagaimana bisa seperti itu?
Pada kamera motor tersebut terpasang sensor Gyro dan akan dihubungkan dengan motor servo sebagai penggerak kamera, agar kamera tetap mendapatkan gambar yang tegak.
Berikut ilustrasinya
Kita bisa membuat sendiri Gyro Camera tersebut dengan menggunakan bantuan modul GYRO dan modul ACCELEROMETER.
Awalnya dua modul tersebut adalah modul yang terpisah, sehingga kita harus menggunakan dua unit modul bersamaan. Kemudian dibuatlah Chip Gyro dan Chip Accelerometer dalam satu modul (ada dua chip dalam satu modul).
Hingga akhirnya versi terbaru keduanya dibuat dalam satu chip saja, sehingga memperkecil distorsi perhitungan gerakan.
Modul yang digunakan di artikel ini adalahTriple Axis Accelerometer & Gyro Breakout – MPU-6050, dimana dalam modul ini terdapat 3-axis gyroscope dan 3-axis accelerometer dalam satu chip. Bekerja dengan catu daya 3.3volt.
Selain modul MPU6050 ini, bisa juga digunakan modul sejenis seperti:
IMU Fusion Board – ADXL345 & IMU3000
IMU Digital Combo Board – 6 Degrees of Freedom ITG3200/ADXL345
Wujud MPU6050 adalah seperti ini.Ukuran sangat kecil, hanya20mm x 15mm dan tebal 1.6mm.
Komponen yang diperlukan antara lain:
Triple Axis Accelerometer & Gyro Breakout – MPU-6050
Arduino UNO R3 (beli)
Digital Servo (gunakan servo yang bagus dan kuat) (beli)
Breadboard Mini
Baterai 9v + Saklar
Box dan Kelengkapan lainnya.
Berikut skema pemasangannya
Setelah semua selesai dirangkai, saatnya untuk melakukan upload program ke Arduino.
Rangkaian proyek ini hanya untuk menggerakkan servo dalam satu axis-X saja. Namun tetap diperlukan data-data dari Axis Y dan Z untuk masing-masing Gyroscope dan Accelerometer.
Dengan perhitungan Kalman Filter, dapat meredam ‘noise’ output dari Gyroscope+Accelerometer sehingga gerakan servo menjadi halus tidak terjadi gerakan yang tidak diinginkan.
Spoiler for Source Program:
Dudukan kamera
Gunakan Acrylic setebal 2mm yang ditekuk dengan cara dipanaskan. Kemudian dibuat lubang-lubang yang diperlukan untuk pemasangan servo dan lubang baut ke kamera.
Berikut hasil video percobaannya
[YOUTUBE]
Sumber
[URL="http://oto.detik..com/read/2013/04/08/100452/2213939/1199/membuat-sendiri-kamera-ala-motogp?o991102638"]detik..com[/URL]
Makasih banyak buat yang udah bantu
apalagi yang berbaik hati ngasih ane
Mampir gan ke Threat Ane yg lain
Ane kira Cuma ada di sms gan.. Ternyata ada juga di PM..ckckckck
Diubah oleh lovestreet 08-04-2013 09:48
0
12.4K
70
Guest
Tulis komentar menarik atau mention replykgpt untuk ngobrol seru
Mari bergabung, dapatkan informasi dan teman baru!
The Lounge
923.1KThread•83.2KAnggota
Terlama
Guest
Tulis komentar menarik atau mention replykgpt untuk ngobrol seru